HyperIMU修复陀螺仪是安卓移动设备的实用工具,主要针对陀螺仪传感器使用时出现的精度丢失、漂移等问题。该软件通过优化底层算法,致力于从硬件层面增强陀螺仪的响应速度和稳定性。其设计目的是帮助用户了解设备传感器的状态,以便进行调整来适配不同应用场景,从而获得更佳的使用体验。
HyperIMU是安卓平台上一套精密的陀螺仪调校方案,它借助智能算法对陀螺仪数据展开分析,可切实降低累积误差与噪声干扰,从而增强设备在体感游戏、VR应用等场景中的表现。通过对传感器数据进行优化,不仅能提升用户的操控体验,还能延长陀螺仪的使用寿命,让用户获得更可靠、更稳定的移动设备使用感受。
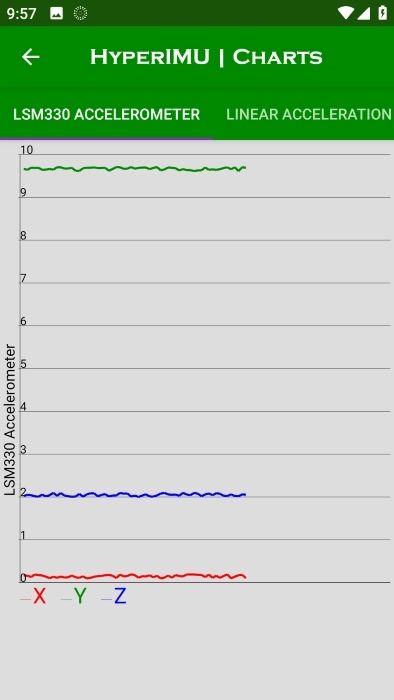
数据呈现直观易懂,以实时图形化方式展示陀螺仪的各项参数,便于用户观察设备传感器的运行状态,快速察觉潜在问题。
参数调整细致入微,根据自身需求,定制化调整陀螺仪的灵敏度、偏移量等关键参数,获得理想的操作手感。
校准流程简易高效,无需复杂设置,只需按照指引操作,即可快速完成陀螺仪校准,恢复设备传感器的正常性能。
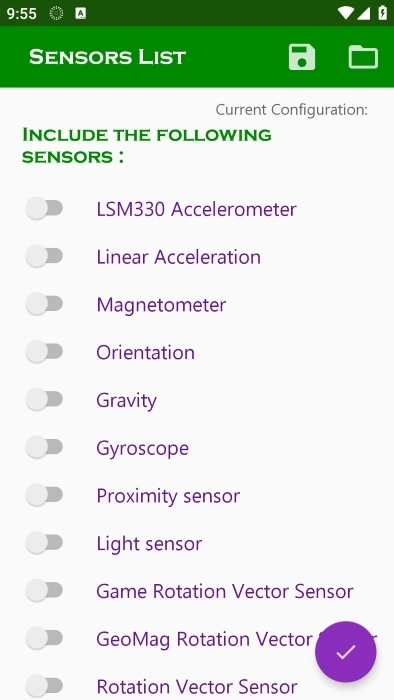
兼容范围广泛,可适配市面上主流安卓设备,对不同品牌、型号的手机和平板电脑均有良好的支持效果。
1.原始数据监测:可以实时监测陀螺仪的原始输出数据,以曲线图或数字形式展现,方便用户观察传感器的原始状态。
2.多维度校准功能:分别对陀螺仪的三个轴向(X、Y、Z轴)进行单独校准,确保每个轴向的精度都达到理想水平。
3.自定义灵敏度:针对不同应用场景,自定义陀螺仪的灵敏度,在游戏中设置较高的灵敏度,在浏览网页时设置较低的灵敏度。
4.误差补偿机制:误差补偿机制,能够自动识别并补偿陀螺仪的静态误差,减少因传感器自身缺陷造成的精度偏差。
1.校准失败怎么办?
校准失败可能由多种原因引起。确认设备是否支持陀螺仪功能,部分低端设备可能未配备该传感器。检查设备周围是否存在磁场干扰,磁场干扰会影响陀螺仪的精度。尝试重启设备后重新进行校准。
2.调整后无效?
参数调整后未生效,首先确认是否已经点击保存按钮,使参数生效。部分应用或游戏可能对陀螺仪有自己的校准机制,会覆盖HyperIMU的设置。尝试在游戏或应用内进行相关设置,或者禁用其陀螺仪校准功能。
3.如何判断校准成功?
校准是否成功,可以通过观察陀螺仪的原始数据是否稳定来判断。在设备静止状态下,理想情况下,数据曲线应趋于平稳,数值波动较小。在游戏或VR应用中,观察操作是否更加流畅、精确,也能反映校准效果。
4.校准需要联网吗?
HyperIMU的校准功能一般无需联网,所有计算与处理均在本地完成。不过像云端校准数据分享、问题反馈这类高级功能,可能得连接网络才能正常使用。

